浙江精密件工业CT扫描检测 三维重建检测
更新:2025-02-05 08:59 编号:15064238 发布IP:58.208.168.162 浏览:67次

- 发布企业
- 浙江广分检测技术有限公司商铺
- 认证
- 资质核验:已通过营业执照认证入驻顺企:第5年主体名称:广分检测院(广州)质检有限公司组织机构代码:91440113MA59CFF65C
- 报价
- 请来电询价
- 关键词
- 精密件工业CT扫描检测 三维重建检测
- 所在地
- 江苏省昆山市陆家镇星圃路12号智汇新城B区7栋
- 联系电话
- 18662248593
- 手机
- 18662248593
- 业务经理
- 周志琴 请说明来自顺企网,优惠更多

详细介绍
CT的全称是ComputedTomography,即计算机断层扫描,通过X射线源、样品和探测器三者之间的相对运动,采集一系列不同角度的样品透视投影图(通常叫DR,DigitalRadiography),再通过三维重建算法可获得样品内部的一系列虚拟切片图,完成三维结构重建。CT技术的核心是由投影数据重建图像的理论,其实质是由扫描所得的投影数据(DR)反求出成像平面上每个点对X射线的衰减系数值。
按扫描获取数据方式的不同,CT技术已发展经历了五个阶段(即五代CT扫描方式)
代CT,使用单源(一条射线)单探测器系统,系统相对于被检物作平行步进式移动扫描以获得N个投影值,被检物则按M个分度作旋转运动。这种扫描方式被检物仅需转动180°即可。代CT机结构简单、成本低、图像清晰,但检测效率低,在工业CT中则很少采用。

第二代CT,是在代CT基础上发展起来的。使用单源小角度扇形射线束多探头。射线扇形束角小、探测器数目少,扇束不能全包容被检物断层,其扫描运动除被检物需作M个分度旋转外,射线扇束与探测器阵列架一道相对于被检物还需作平移运动,直至全部覆盖被检物,求得所需的成像数据为止。
第三代CT,它是单射线源,具有大扇角、宽扇束、全包容被检断面的扫描方式。对应宽扇束有N个探测器,保证一次分度取得N个投影计数,被检物仅作M个分度旋转运动。第三代CT运动单一、好控制、效率高,理论上被检物只需旋转一周即可检测一个断面。
第四代CT,也是一种大扇角全包容,只有旋转运动的扫描方式,但它有相当多的探测器形成固定圆环,仅由辐射源转动实现扫描。其特点是扫描速度快、成本高。
如下所示是4种CT扫描模式的示意图。

第五代CT,是一种多源多探测器,用于实时检测与生产控制系统。源与探测器按120°分布,工件与源到探测器间不作相对转动,这种CT技术难度大,成本高但较其他几种CT效率有显著提高。
上述五种CT扫描方式,在工业CT中用得*普遍的是第二代与第三代扫描,其中尤以第三代扫描方式用得*多。这是因为它运动单一,易于控制,适合于被检物回转直径不太大的中小型产品的检测,且具有成本低,检测效率高等优点。
如何形象地理解CT重建算法的原理?
一、通过代数形式解释
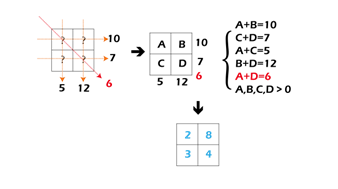
假设有如下图所示的2×2的二维平面方格,每个方格中有一个未知的自然数,我们要根据不同方向投影相加的数值,反求出4个未知数A、B、C、D。
我们获得了0度和90度2个方向的投影信息,建立方程组,求解后发现未知数有4种可能的解。

很显然,上述结果与事实偏离太多,这提醒我们仅有0度和90度两个方向的投影数据太少了,我们再增加45度的投影数据(如下图所示)。此时,就能得到的解。
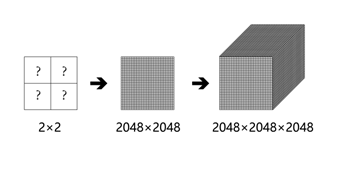
上述过程是简单的2×2的二维平面网格,以此类推,如下图所示,实际的CT重建是对数据量巨大的三维立体网格进行反求的过程。
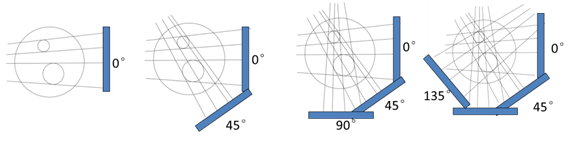
二、通过几何形式解释
在不同角度采集投影图的过程
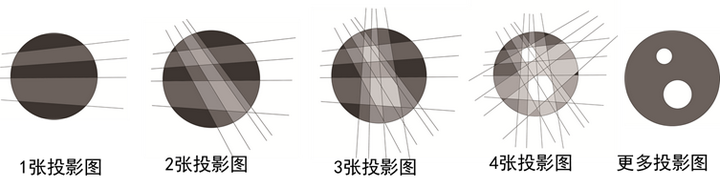
反投影法重建过程示意图
| 成立日期 | 2020年07月01日 | ||
| 法定代表人 | 周乐辉 | ||
| 注册资本 | 1000 | ||
| 经营范围 | 无损、环境、土壤、水质、金属材料、劳保用品等检测服务 | ||
| 公司简介 | 江苏广分检测技术有限公司:核心价值观:安全第一,公正廉洁,尊长敬司,创新为魂,应用为重,励精图治。经营服务理念:用心服务,用先进科学检测技术为客户发现、消除火灾隐患,追求安全与经营效益的双赢,造福社会。企业行为准则:方法科学,诚信经营,坚持原则,为客户提供公正、科学、高效的优质服务。员工行为准则:诚实守信,尊长敬业;笑看得失,莫议人非;爱岗敬业,和合处世;技术精湛,服务至上;遵章守法,勇担责任。公 ... | ||
- 金华防坠落安全带检测 全身式安全带 高空安全带检测检测范围汽车安全带,全身式安全带,安全带绳索,半身安全带,安全带脚扣,安全带锁扣... 2025-01-13
- 西湖区防坠器,安全绳检测 安全带 安全帽 绝缘服检测绝缘用具是保护咱们电工师傅安全作业的zui后一道屏障,因此,绝缘用具的规范使用、... 2025-01-13
- 下沙区验电器检测 绝缘手套检测 令克棒年检绝缘工具的试验方法与标准一、试验前的检查试验前应检查工具的完整性和表面状况。被试... 2025-01-13
- 嘉定区绝缘凳检测 接地线 绝缘软梯检测电力安全工器具的检测是为了在电力系统操作、维护、检修、试验、施工等现场作业中,防... 2025-01-13
- 奉贤区绝缘靴 绝缘手套检测 铺设绝缘垫耐压试验绝缘靴使用保管注意事项.采用特种橡胶制成,作用是使人体与大地绝缘,防止跨步电压,... 2025-01-13







